
Ein "verständlicher" Einblick insbesondere für Laien in
die moderne (bürstenlose Servo-) Motoren-Technik,
die in den diversen DLT Laufwerken und Libraries (und Band- Robotern) verwendet werden. Und natürlich immer etwas mehr, damit Sie kompetent mitreden können.
.
Für den Laien hier eine Aufzählung . . . .

- ein kleiner CD/DVD Motor


- ein älterer DLT Servo-Motor


- ein jüngerer LTO Servo-Motor

- ein moderner DVD Linear-Motor

der wichtigsten Motoren- Arten oder Konzepte.
Es gibt (ist noch nicht vollständig) :
.
- Wechselstrom Motoren (AC = alternate current)
- Gleichstrom Motoren (DC = direct current)
- (Drehstrom Motoren (haben meist 3 Phasen und richtig Kraft) und meist nur eine Geschwindigkeit)
- - und dann gibt es innerhalb jeder Kategorie
- Motoren mit Bürsten
- bürstenlose Motoren (brushless motors)
.
- und jede der obigen Kombinationen gibt es in zwei Ausführungen
- mit Gleitlagern oder
- mit Kugellagern
- - und dann die ganz modernen Motoren, bei denen sich nichts mehr "dreht"
- das sind Linear-Motoren (auch Voice Coil genannt)
.
Warum so viele unterschiedliche Arten ?
Die DLT Laufwerke z.B. werden zumeist in EDV Umgebungen (und Geräten) betrieben, in denen sie nur 5 Volt und 12 Volt und selten 48 V Gleichspannung (DC = direct current) zur Verfügung haben. Es wäre also sehr ungeschickt, dort 230 Volt Wechselstrom oder sogar 400 Volt Drehstrom Motoren zu verwenden.
Selbst 24 Volt Wechselspannung müsste erst künstlich erzeugt werden. Also benutzt man meist 12 Volt DC Motoren. Es gibt da wenige Ausnahmen, wenn nämlich erhebliche Kräfte gebraucht werden, um z.B. bei HP einen Roboter-Schlitten schnell hin und her zu fahren.
Die HP-Librarys haben da ein extra 24 V DC Netzteil eingebaut. Oder sie betreiben ein Batterie- Ton-Bandgerät wie das legendäre Uher Report 4000 mit einem 6V Akku.
.
Aber der Reihe nach :
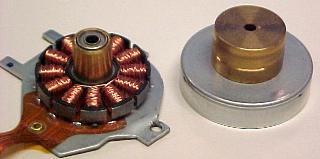
- ein Außenläufer Servo Motor (zerlegt)
Bei jedem Motor unterscheidet man
- den beweglichen (rotierenden) Teil, den Rotor, und
- den stehenden (statischen) Teil, den Stator.
Der Rotor kann sich entweder innerhalb des Stators drehen (das ist der Normalfall) oder außen um ihn herum (ein sogenannter Außenläufer).

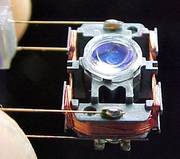
Eine Ausnahme ist der Linear Antrieb,
der bei den modernen schnellen Festplatten und CD/DVD Laufwerken und anderen Geräten zum Einsatz kommt. (Früher hatten billige Festplatten (NEC 40MB) auch noch Schrittmotoren)
Die Besonderheit: extrem viel Kraft auf linearen ganz kurzen Wegen mit unglaublicher Präzision.
.
Jedes dieser obigen Konzepte hat Vor- und Nachteile.
.
.