
DLT Schrittmotoren

Der Motor für die DLT-Kopfpositionierung ist solch ein Schritt- Motor. Er hat immer die gleiche Last an der Spindel, nämlich nur den Magnetkopf, und dreht immer mit der gleichen Geschwindigkeit. Dieser Motor hier (DLT-2000) dreht sich pro Schritt nur 1,8 Grad weiter (von 360 Grad für eine volle Runde). Er hat auch kein Getriebe, das die Last etwas mindert.
Er scheint so dimensioniert zu sein, daß er immer genug Kraft hat, um den Kopf "richtig" zu bewegen. Dieser Motor hat, wie die meisten anderen kleineren Schrittmotoren auch, nur Gleitlager, die der erwarteten Lebensdauer angemessen sind. Man muß das nicht übertreiben, der Motor fährt nicht tagelang den Kopf ununterbrochen rauf und runter.
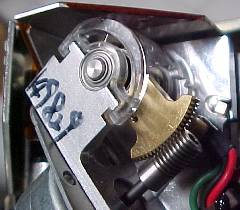
Noch ein Schrittmotor.
In diesem Bild kann man den DLT-7000 (und 8000) Kopf- Neige- Motor unten links noch gut erkennen. Besser erkennt man das Schneckengetriebe und den Glockenanker, der den Magnetkopf sowohl senkrecht stellen kann als auch gezielt geneigt in zwei definierte Schräglagen bringen kann.
Dieser Schrittmotor ist noch kleiner, hat aber noch weniger Last zu bewegen, denn er dreht nur den Kopf.

Der Roboter in der Library
Auf diesem Bild sehen Sie gleich 3 kleinere Schrittmotoren, mit denen HP in dem 818 Loader die Kassetten aus den Schächten in das Laufwerk füttert und wieder abholt. Auch diese Motoren laufen bei der Arbeit immer mit gleicher Geschwindigkeit und müssen die nahezu gleiche Kraft aufwenden.
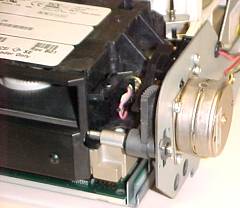
Der Quantum Loader Drive
Hier ist der standard Quantum "Loader Drive Zusatz" mit dem angeflanschten Schrittmotor zu sehen. Dieser Motor öffnet und schließt den Lademechanismus über ein hoch untersetztes Getriebe und kann daher die Kraft aufbringen, die starke Feder der Mechanik zu überwinden. Die Endstellung wird dazu mit einer Lichtschranke verschleißfrei überwacht.