
Am Anfang mußte er überhaupt erstmal funktionieren


Der später publizierte Begriff des "Servo-Motors" sagte nichts über die Anfänge aus. Ein simpler DC-Motor - mit Bürsten (das sind die gefederten Kohlestifte auf dem Kommutator) - konnte durch Anlegen einer variablen Gleichspannung von 0 bis auf 100% eingestellt werden. Durch Umkehren der Polarität drehte auch mancher DC-Motor rückwärts. Aber von einer Drehzahl- "Regelung" (vor allem unter Belastung) war da bislang keine Rede. Mit ein paar Tricks konnte man mit der elektronisch (nach-) geregelten Spannung leidlich nachhelfen.
Das alles änderte sich mit dem bürstenlosen DC-Motor - ein verkappter Drehstrommotor. Hier konnte man die Geschwindigeit auch unter Belastung wesentlich besser steuern = "regeln". Doch diese Technik wollte die Drehrichtung partout nicht wechseln. Auch war der ganze untere langsame Dehzahlbereich aus dem Stillstand heraus mangelhaft bis gar nicht zu steuern. Für den CD- und den DVD- Antrieb mit hohen Drehzahlen reichte das aber aus.
Mit dem dann verbesserten "Servo"-Motor ging das endlich einfacher und sauberer, weil die gesamte Steuer-Intelligenz der Drehzal-Steuerung in einem hochintegrierten Chip wohnte. Doch das war noch nicht das Ende der Fahnenstange, weil diese Servo-Motoren zwar funktionierten, aber für mobile Anwendungen noch viel zu groß und zu schwer waren.
.


So groß waren die ersten Servomotoren von Siemens im April 1970 - ein Riesenteil.
.
Darum hier zwei Beispiele, was die Ingenieure entwickelten
Unser erstes AHA-Erlebnis war 1986, als wir einen irreparablen Panasonic NV180 VHS-Recorder (ein Mainboard Schaden) zerlegen durften. Unter den beiden Wickeltellern der VHS-Kassette - die war damals noch recht groß und unförmig - befinden sich zwei "ganz flache" Motörchen, nach damaliger Lesart.
In manchen modernen Kassettenrecorden der 1980er hatten wir auch schon solche geregelten DC-Servo-Motoren, die in den Prospekten auch noch lautstark angepreisen wurden. Hier in dem NV180 wurde das gar nicht mehr hervorgehoben, die waren da schon ganz normal - für 1985.
.


Was wir damals natürlich noch nicht wußten, daß es nur zehn Jahre später 1995 noch viel kleinere und dazu extrem flachere Servomotoren geben würde, die dazu auch noch ganz extrem langsam und absolut ruckelfrei arbeiten würden.
.
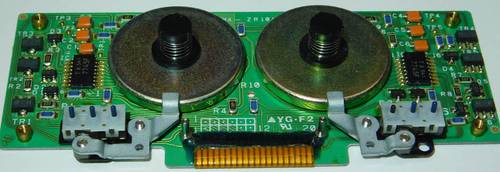
- Zu jedem Motörchen gehört links und rechts der Steuerbaustein.

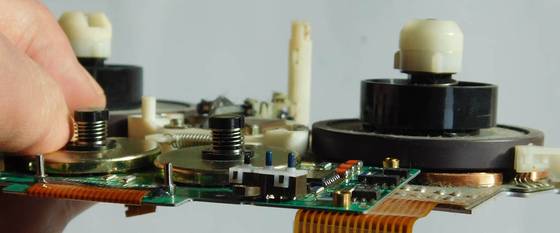
Beeindruckend ist der Vergleich der beiden "Drives"
Da eines unserer uralten DDS-Laufwerke dermaßen verharzt war und lautstark geklemmt hatte, konnten wir es zerlegen. Diese Mineaturisierung ist schon beeindruckend. Die beiden unabhängigen Motörchen ermöglichen eine ganz langsame Bandgeschwindigkeit mit einem konstanten Bandzug des Bandes am Schrägspurkopf vorbei. Hier muß das Band immer stramm an der schräg drehenden Trommel anliegen - immer. Bei dem normalen analogen CC-Recorder wäre das kein Problem, doch jetzt bei den schrägen Spuren auf dem Band, da mußte alles präzise stimmen.
.

- Oben die VHS Wickelteller - unten die DAD/DDS Wickelteller

Unter die Haube schaun - das Innenleben eines Servo-Motors
Auf die metallne Trägerplatte (aus Eisenblech) ist eine Isolierschicht (= ein Lack) samt einer Kupferschicht oben drauf - aufgebracht worden, auf dem nach dem Ätzen die Leiterbahnen übrig bleiben. Auf diese Kupferleiterbahnen werden die elektronischen Bauteile aufgelötet und die jeweils 6 dreieckigen Spulen der beiden Motörchen aufgeklebt und angelötet.
Dir Drehteller für die beiden Bandwickel sind sogar kugelgelagert. Beachten Sie auch die 3 Hall-Sensoren in dreien von den 6 Spulen (rote Pfeile). Damit läßt sich die genaue exakte Drehzahl, die Lauf-Richtung und die aktuelle Drehposition des Wickeltellers bestimmen.
.



.
Beeindruckend ist die geringe Bauhöhe dieses DAT-Konstruktes
.
- Vorne links die DAT/DDS Platine und dahinter die VHS Motoren


- Blick von der Seite


- und Blick von unten auf die Motoren-Platte

.


In den Taschen-Diktiergeräten von "Olympus" geht es noch kleiner
Dort sind dann noch kleinere Motörchen mit dieser Technik eingebaut. Die Geräte dürfen wir aber noch nicht aufmachen.
Eines der ganz edlen dieser Geräte ist das Modell Pearlcorder X-02, das komplett Tiptasten gesteuert ist - samt der Tiptasten-Fernbedienung.
.